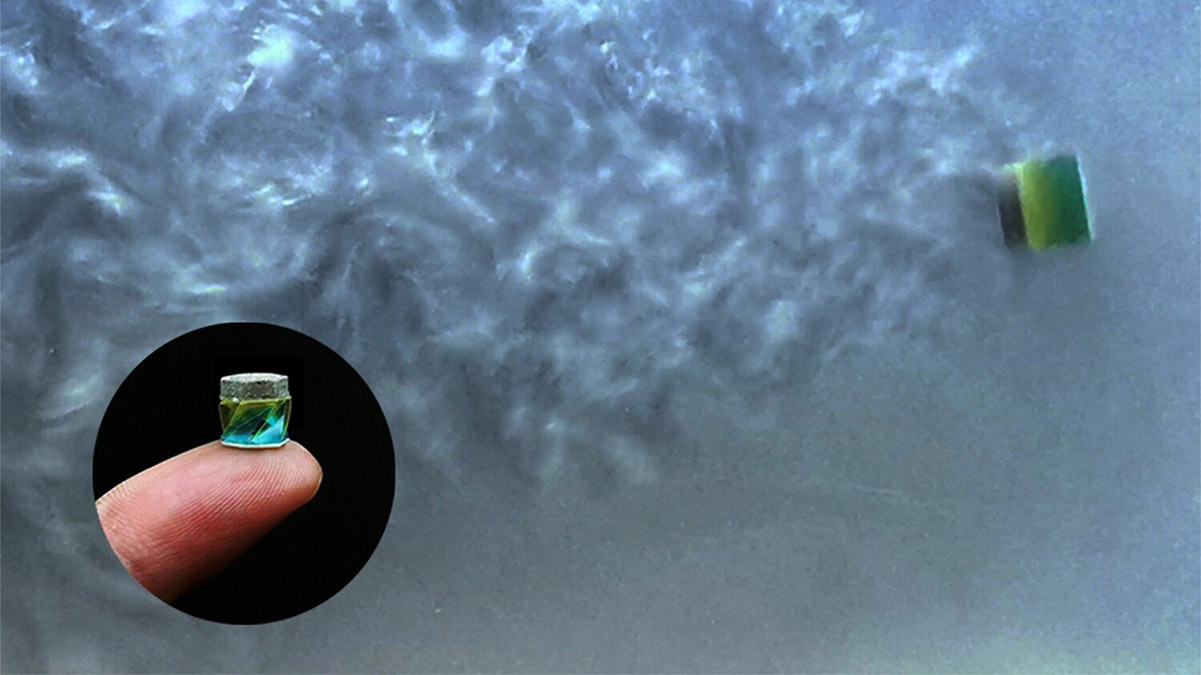
Новый вид полого робота размером с горошину может кататься, переворачиваться и прыгать, чтобы ориентироваться в окружающей обстановке. Он может легко переходить с сухих поверхностей в жидкие, что делает его амфибией. Его способность использовать различные типы движений в различных условиях для доставки груза отличает его от других роботов малышей, большинство из которых могут двигаться только одним способом. Универсальность нового робота также делает его уникальным специалистом в преодолении препятствий и обходе их. Его небольшие размеры и многофункциональность позволяют ориентироваться в сложных условиях в человеческом организме и доставлять необходимую дозу лекарств до очага болезни.
Способность робота преодолевать физические препятствия проистекает из уникальной конструкции: он сложен в виде оригами, называемого узором Креслинга, и увенчан магнитом. Узор Креслинга выглядит как ряд сложенных друг на друга прямоугольных треугольников, обернутых вокруг робота, что делает его похожим на ребристый и слегка сплющенный цилиндр. Ребра также придают ему форму пропеллера, которая помогает ему двигаться в жидкости. Небольшое отверстие на одном конце обеспечивает доступ к полому центру робота, в котором будет находиться или предмет или жидкость. Магнит на другом конце позволяет управлять машиной по беспроводной сети – все, что нужно оператору, это его собственный магнит. Вид магнитного поля, который использовали исследователи, аналогичен типу, создаваемому аппаратом магнитно-резонансной томографии (МРТ), объясняет Чжао. “Я думаю, что одной из стратегий было бы разработать этого робота так, чтобы он был совместим с системой МРТ”, – говорит она, чтобы управлять им, пока пациент находится в аппарате визуализации. Чжао добавляет, что разработка нового устройства, которое могло бы генерировать и управлять правильным магнитным полем, также является вариантом, но для этого потребуется включить медицинскую визуализацию, как это делает аппарат МРТ, чтобы отслеживать местоположение робота в теле.
Некоторые версии нового робота имеют второй магнит на противоположной стороне его мягкой цилиндрической конструкции. Это делает робота прокачиваемым. Оператор, управляющий магнитным полем, создает небольшую вращательную силу между магнитами, которая сжимает тонкий пластиковый корпус робота. Повторное выполнение этого может привести к перекачке жидкости из живота робота в окружающую среду.
Устройство может делать больше, чем просто доставлять жидкие полезные грузы. Его пропеллероподобная форма означает, что оператор может заставить его вращаться, применяя вращающееся магнитное поле, и тем самым проталкивать его через жидкости. Это вращение также создает достаточное всасывание, чтобы втягивать предметы в полый живот робота. И когда он плавает, вращательное движение удерживает всасываемый полезный груз внутри. Когда робот достигает места назначения, оператор может остановить вращение, и робот выбросит все, что он подобрал. Это позволяет доставлять небольшие твердые полезные грузы в целевые места
Теоретически, этот процесс может доставлять жидкие или твердые лекарства непосредственно в определенные участки тела — например, в пищеварительный тракт. По словам Чжао, робот был разработан из достаточно мягких материалов, чтобы избежать повреждения тканей. Она отмечает, что даже магнит мягкий. Команда сделала это, встроив крошечные стеклянные бусины и металлические наночастицы в гибкий пластик. Исследователи продемонстрировали, что робот может маневрировать в сухой среде пустого желудка свиньи, а также в желудке, заполненном жидкостью. Они контролировали общую траекторию робота, но не было необходимости указывать ему, как маневрировать вокруг небольших препятствий: магнитное поле указывало ему двигаться в определенном направлении, и он катился, кувыркался или выполнял любые другие движения, необходимые для прохождения этого пути. Если робот столкнется с большим препятствием, его оператор может на короткое время увеличить силу магнитного поля, чтобы заставить робота прыгать. Если устройство попадет в глубокую лужу с жидкостью, оператор может изменить магнитное поле, чтобы устройство плавало.
Эта многофункциональность в таком простом роботе удивила Сийи Сюя, инженера-робототехника в Гарвардской лаборатории микророботики, который не участвовал в новом исследовании.* “Очень интересно наблюдать, как они достигают многих из этих способностей в одном интегрированном [дизайне]”, – говорит она. Сюй добавляет, что многие подобные маленькие роботы специализируются только на одном виде движения, будь то ходьба, ползание, плавание или полет.
По словам Чжао, новый, более совершенный дизайн оригами может стать прототипом будущих крошечных роботов. Это может открыть больше применений. “Эти функциональные возможности не ограничены конкретным заболеванием или конкретным применением”, – говорит она. Сейчас она и ее лаборатория рассматривают вопрос о том, как можно сделать этих роботов еще меньше и способными перемещаться в кровотоке. Чуть более крупные роботы могут нести крошечные камеры или щипцы, которые были бы полезны для минимально инвазивных медицинских процедур. Чжао планирует продолжить изучение подобных устройств, добавив еще больше возможностей этим микроробот при сохранении их простоты конструкции.